A Brief Introduction to Neural Radiance Fields | CESCG Academy 2023
CESCG
Overview
This video introduces Neural Radiance Fields (NeRFs), a powerful technique for creating detailed 3D scene reconstructions from 2D images. It explains the limitations of traditional 3D representations like point clouds and meshes, highlighting their memory intensiveness and inability to model view-dependent effects. NeRFs overcome these by using a neural network to implicitly represent a scene's color and density as a continuous function of 3D position and viewing direction. The presentation details the underlying principles of volume rendering, how NeRFs are trained using differentiable rendering, and various optimizations and extensions that improve speed, memory efficiency, and geometric accuracy, making them a rapidly evolving area in computer vision.
Save this permanently with flashcards, quizzes, and AI chat
Chapters
- Traditional 3D reconstruction methods (e.g., point clouds, meshes) are memory-intensive and assume Lambertian surfaces (color doesn't change with viewing angle).
- Implicit scene representations, like Signed Distance Functions (SDFs), offer an alternative but can still be memory-intensive with voxel grids.
- NeRFs provide a novel implicit representation that can capture high-detail geometry and color, including view-dependent effects like reflections.
- NeRFs can achieve compact scene representations, sometimes as small as a megabyte for a room.
- Volume rendering, a technique from the 1980s, is the foundation for NeRFs.
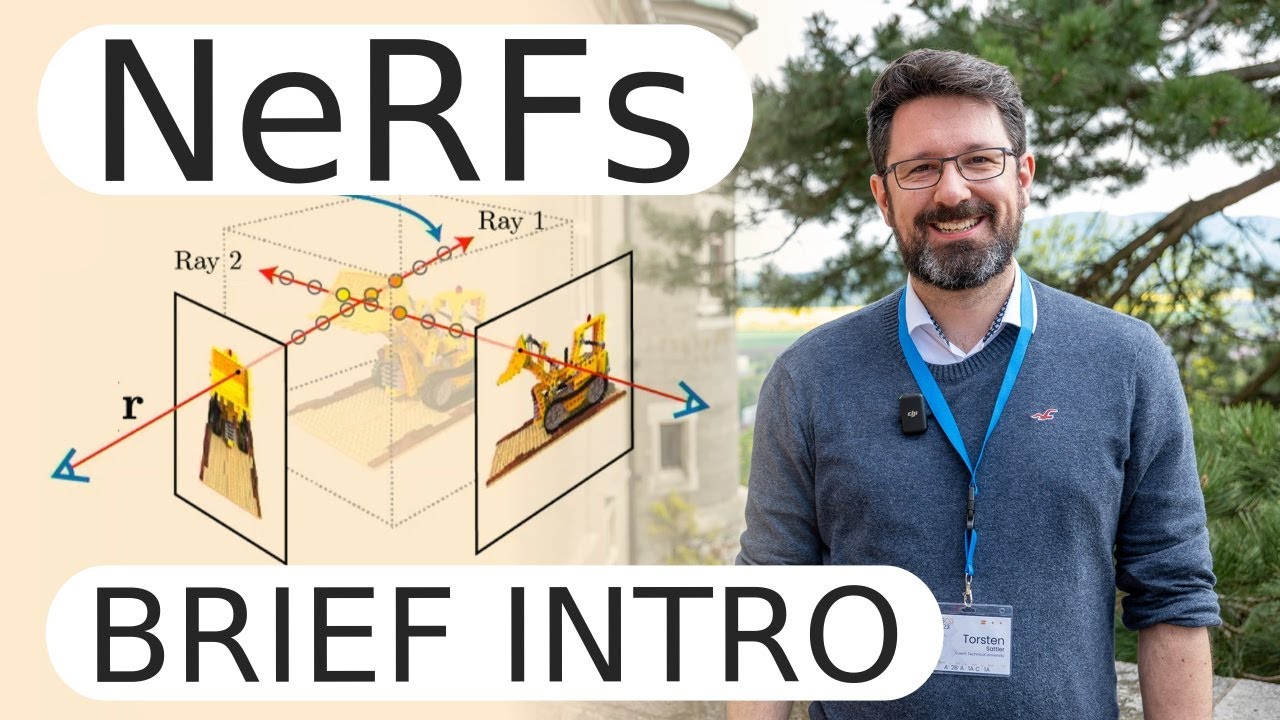
- To render a pixel, a ray is cast into the scene, sampling points along the ray.
- At each sample point, color (RGB) and volume density (sigma) are evaluated.
- The final pixel color is a weighted combination of these samples, considering visibility and accumulated density along the ray.
- NeRFs learn a continuous volumetric scene representation using a neural network.
- The network takes a 3D point's position and a viewing direction as input.
- It outputs the color (RGB) and volume density (sigma) at that point, allowing for view-dependent effects.
- Rendering an image involves casting rays, sampling points, querying the NeRF network for color and density, and applying volume rendering.
- NeRFs are trained by minimizing the difference between rendered pixel colors and ground truth colors from input images.
- Random sampling along rays helps cover the space more continuously during training.
- A coarse-to-fine sampling strategy improves efficiency by first estimating density with a coarse network and then sampling more densely in relevant areas with a fine network.
- Positional encoding (using sine and cosine functions) is crucial for the network to learn high-frequency details.
- Original NeRFs are slow due to extensive neural network evaluations.
- Methods like Plenoxels replace the neural network with explicit voxel grids and spherical harmonics, significantly speeding up rendering.
- Multi-resolution voxel grids and feature hashing (e.g., Instant NGP) further reduce memory and improve training/rendering speed.
- These optimizations allow for near real-time training and rendering, making NeRFs more practical.
- Extracting geometry directly from NeRF's volume density can be noisy and ill-defined.
- A more robust approach is to train NeRFs to predict Signed Distance Functions (SDFs) instead of just density.
- SDFs provide a well-defined surface (the zero level set) from which high-quality geometry can be extracted using algorithms like Marching Cubes.
- Reconstructing accurate geometry is challenging with sparse input views or complex scenes (e.g., reflective surfaces).
- Reconstruction from sparse views is an under-constrained problem, leading to artifacts.
- Incorporating additional monocular cues like predicted depth and surface normals can regularize the training process.
- These priors provide extra constraints, helping the NeRF learn more accurate and consistent geometry even with limited input images.
- While depth and normals offer the best results, even one of these cues can significantly improve reconstruction quality.
- Tools like NeRF Studio streamline the NeRF training workflow, from data processing to visualization.
- The process typically involves extracting camera poses from images (using Structure-from-Motion) and then training a chosen NeRF model.
- NeRFs can handle complex scenes, including reflective and refractive surfaces, though extracting precise geometry from such materials remains difficult.
- Emerging applications include text-to-3D generation (e.g., DreamFusion), which learns to translate text prompts into NeRF representations.
Key takeaways
- NeRFs represent 3D scenes implicitly using neural networks, capturing complex details and view-dependent effects better than traditional methods.
- Volume rendering is the fundamental technique used to render images from NeRFs by accumulating color and density along camera rays.
- Training NeRFs requires careful sampling strategies and techniques like positional encoding to achieve high-fidelity results.
- Significant optimizations have been developed to make NeRF training and rendering much faster and more memory-efficient.
- Extracting precise 3D geometry from NeRFs is more reliable when the network learns Signed Distance Functions (SDFs) rather than just volume density.
- Incorporating prior information like predicted depth and surface normals can greatly improve geometric reconstruction quality, especially with limited input data.
- NeRFs are a rapidly advancing field with tools like NeRF Studio making them more accessible and applications extending to text-to-3D generation.
Key terms
Test your understanding
- How does a NeRF represent a 3D scene differently from traditional methods like meshes or point clouds?
- Explain the core process of volume rendering and its role in generating an image from a NeRF.
- What are the key techniques used to train a NeRF effectively, and why is positional encoding important?
- Describe the challenges in extracting precise 3D geometry from a NeRF and how using SDFs addresses this issue.
- How can incorporating monocular depth and normal cues improve the quality of 3D reconstructions from NeRFs, especially with sparse input data?