Lecture 2 Mechanical Vibrations MECH3215 S2024
nader zamani
Overview
This lecture introduces fundamental concepts in mechanical vibrations, starting with simple models like pendulums and mass-spring systems. It formally defines 'degree of freedom' as the minimum number of independent coordinates needed to describe a system's configuration. The lecture differentiates between single and multi-degree-of-freedom systems, providing numerous examples. It then classifies vibrations into free vs. forced, damped vs. undamped, and deterministic vs. random. The core mathematical model for a single-degree-of-freedom undamped system, the 'mother of all equations' (mx'' + kx = 0), is derived, and its solution is explored, including the natural frequency (sqrt(k/m)) and the role of initial conditions in determining amplitude and phase. Finally, it touches upon practical applications and related concepts like static deflection and phase relationships between displacement, velocity, and acceleration.
Save this permanently with flashcards, quizzes, and AI chat
Chapters
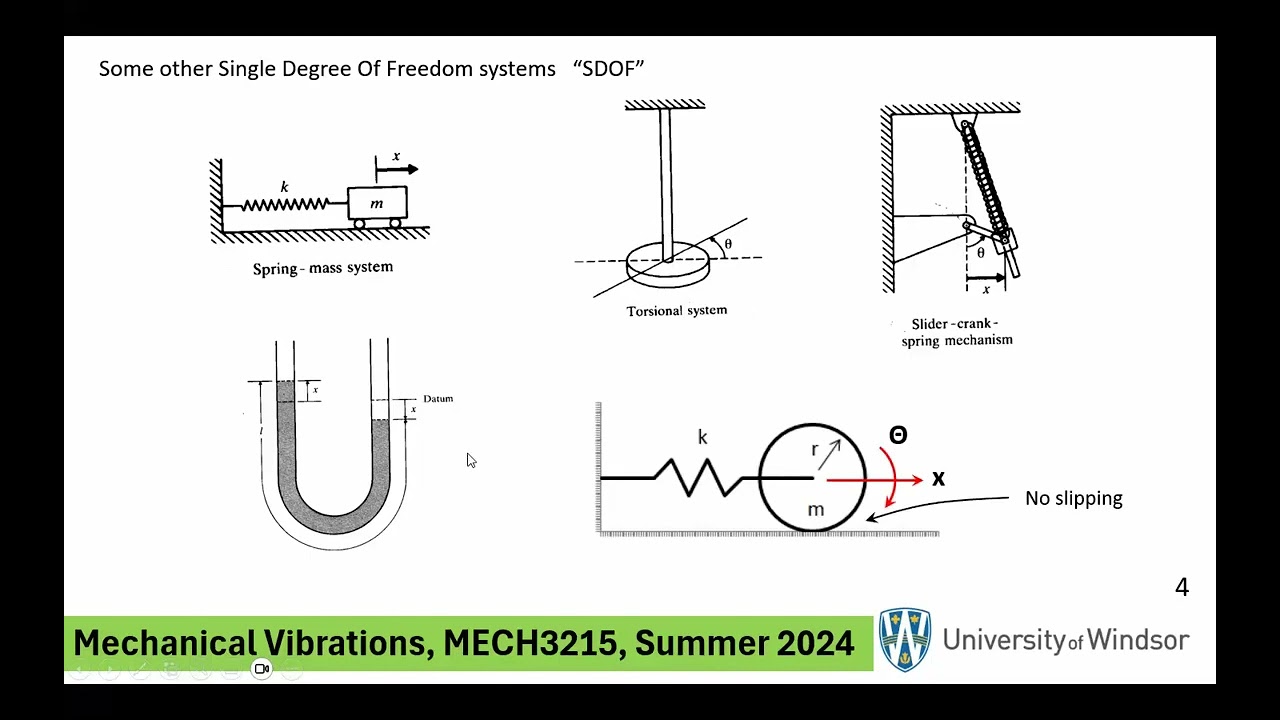
- Simple vibration models like pendulums and mass-spring systems are introduced.
- A formal definition of 'degree of freedom' is provided: the minimum number of independent coordinates to fully describe a system's state.
- Examples illustrate how different physical systems can be simplified to single-degree-of-freedom (SDOF) models.
- The choice of coordinates can vary, but the number of independent ones defines the degree of freedom.
- Systems requiring more than one independent coordinate to describe their motion are classified as multi-degree-of-freedom (MDOF) systems.
- Examples of two-degree-of-freedom systems include systems with two masses connected by springs or coupled pendulums.
- The presence of rigid connections can reduce the degrees of freedom, even if multiple masses are involved.
- Continuum structures, like buildings, theoretically have infinite degrees of freedom, but are often approximated as MDOF systems using finite element methods.
- Vibrations can be classified as free (no external force after initial disturbance) or forced (driven by an external force).
- Systems can be undamped (no energy loss) or damped (energy loss due to friction or dampers).
- Vibrations can be deterministic (predictable motion) or random (unpredictable, often modeled statistically).
- Real-world systems are typically damped and may experience random forces, but simplified models often start with undamped, deterministic cases.
- The fundamental equation for a single-degree-of-freedom undamped system is mx'' + kx = 0, where 'm' is mass, 'k' is stiffness, and 'x' is the displacement coordinate.
- This equation's solution is of the form x(t) = A * sin(omega_n * t + phi), where A is amplitude, omega_n is natural frequency, and phi is the phase angle.
- The natural frequency (omega_n) is derived as sqrt(k/m), representing the system's inherent oscillation rate.
- Initial conditions (initial displacement and velocity) determine the specific values of amplitude (A) and phase angle (phi).
- When gravity acts on a vertical mass-spring system, it shifts the equilibrium position but does not affect the natural frequency (omega_n = sqrt(k/m)).
- The solution x(t) = A * sin(omega_n * t + phi) can be expressed using constants C1 and C2 (from differential equations) or amplitude A and phase angle phi.
- The amplitude (A) and phase angle (phi) are determined by the system's initial displacement (x0) and initial velocity (v0).
- The relationship between displacement, velocity, and acceleration in sinusoidal motion shows phase leads: acceleration leads velocity, and velocity leads displacement by 90 degrees.
- The natural frequency of a system can be estimated using its static deflection (delta_st) and the acceleration due to gravity (g) via omega_n = sqrt(g / delta_st).
- This relationship is useful because measuring static deflection can sometimes be easier than determining mass and stiffness directly.
- For systems like car suspensions or aircraft wings, the stiffness 'k' can be derived from material properties (E), geometry (I), and length (L).
- Key vibration parameters like peak values, RMS values, and average values can be calculated from the amplitude and frequency of the motion.
Key takeaways
- The degree of freedom quantifies the minimum independent coordinates needed to define a system's configuration, simplifying complex systems into models.
- Vibrations are categorized by their driving force (free vs. forced), energy dissipation (damped vs. undamped), and predictability (deterministic vs. random).
- The 'mother of all equations' (mx'' + kx = 0) governs undamped single-degree-of-freedom systems, with its solution dependent on natural frequency and initial conditions.
- Natural frequency (sqrt(k/m)) is an intrinsic property of a system, indicating how fast it oscillates when disturbed.
- Gravity shifts the equilibrium position in vertical systems but does not alter the natural frequency of a mass-spring system.
- Phase relationships are critical: acceleration leads velocity, and velocity leads displacement by 90 degrees in simple harmonic motion.
- Static deflection can be used to estimate natural frequency, providing a practical method for analysis when mass and stiffness are not directly known.
Key terms
Test your understanding
- What is the formal definition of a degree of freedom, and why is it important for analyzing mechanical systems?
- How does the classification of a vibration as 'free' versus 'forced' impact the mathematical model used for analysis?
- Explain the relationship between mass (m), stiffness (k), and natural frequency (omega_n) in an undamped single-degree-of-freedom system.
- Why does gravity not affect the natural frequency of a simple mass-spring system, even though it influences the equilibrium position?
- Describe the phase relationship between displacement, velocity, and acceleration in simple harmonic motion.